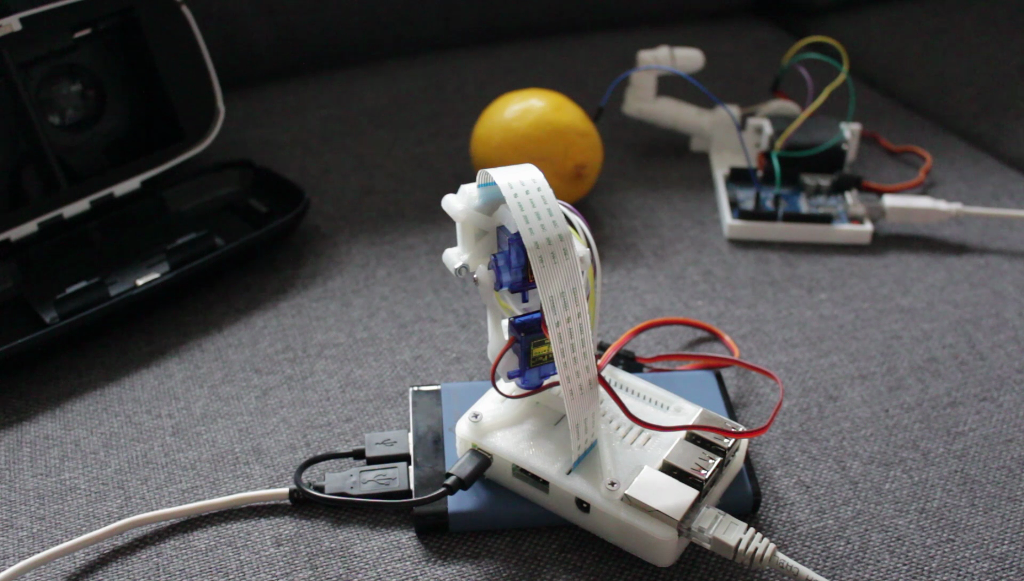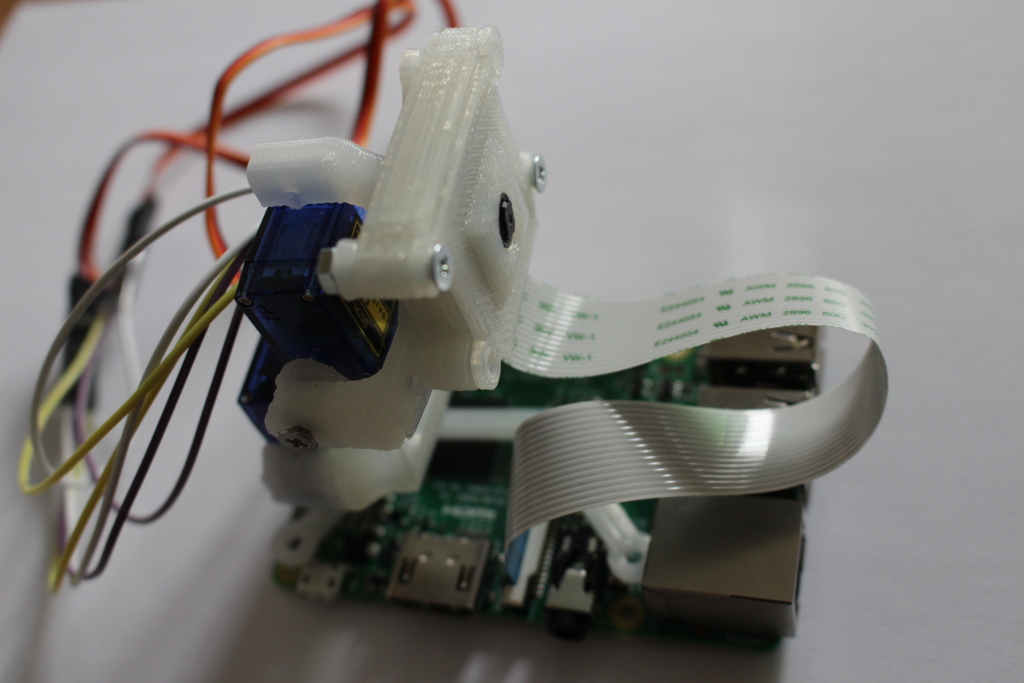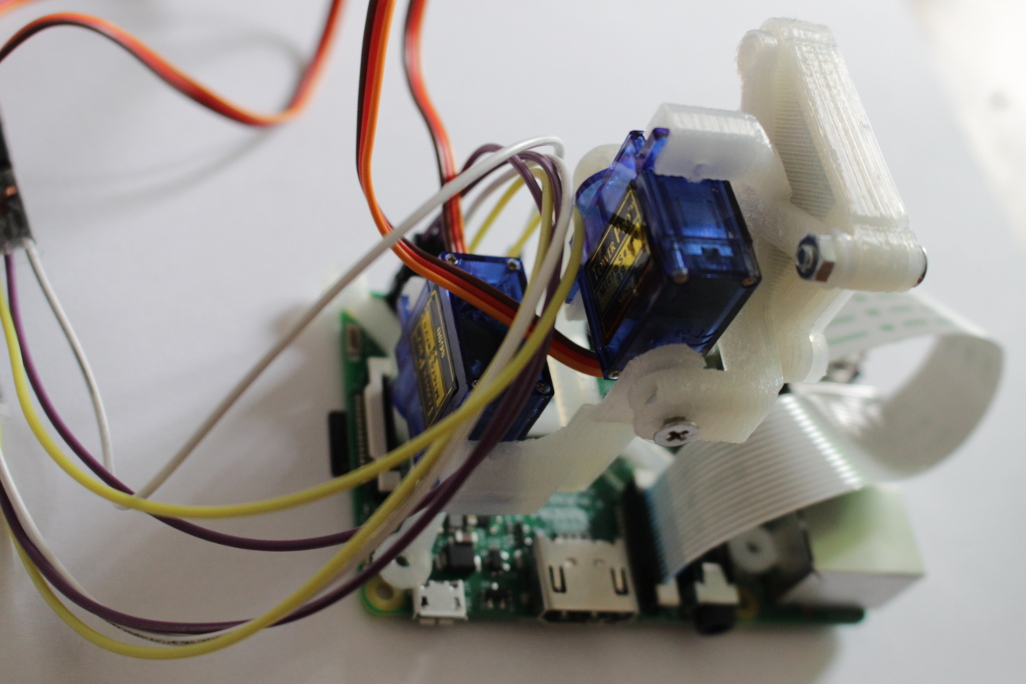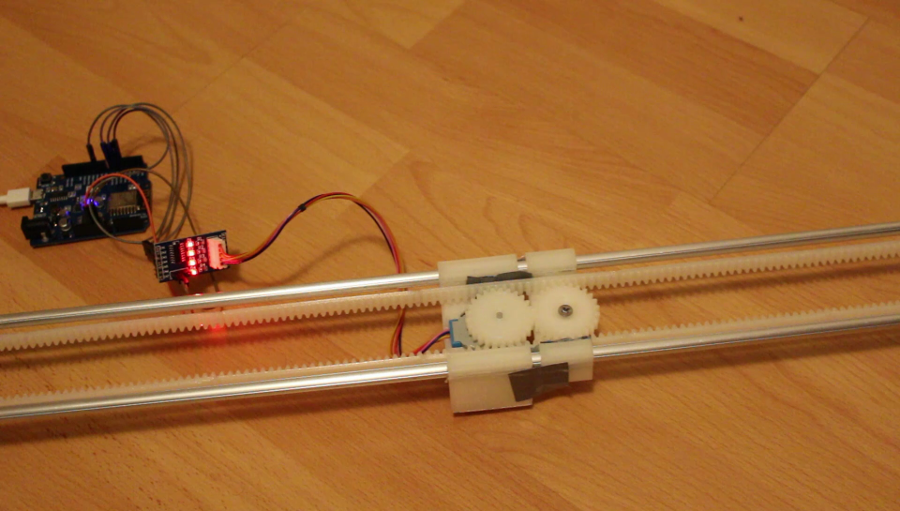
Um die neue Kameraausstattung perfekt zu machen, habe ich der 3-Achsen Zeitrafferschiene und dem Raspberry Pi 3 mit der Nachtsicht-Kamera PiNoir noch eine hervorragende Software spendiert:
OpenCV. OpenCV versetzt den Raspberry Pi in die Lage, nicht nur automatisch die Kamera auszulösen, wenn sich etwas bewegt, sondern kann auch erkennen was und wohin und mit welcher Geschwindigkeit es sich bewegt.
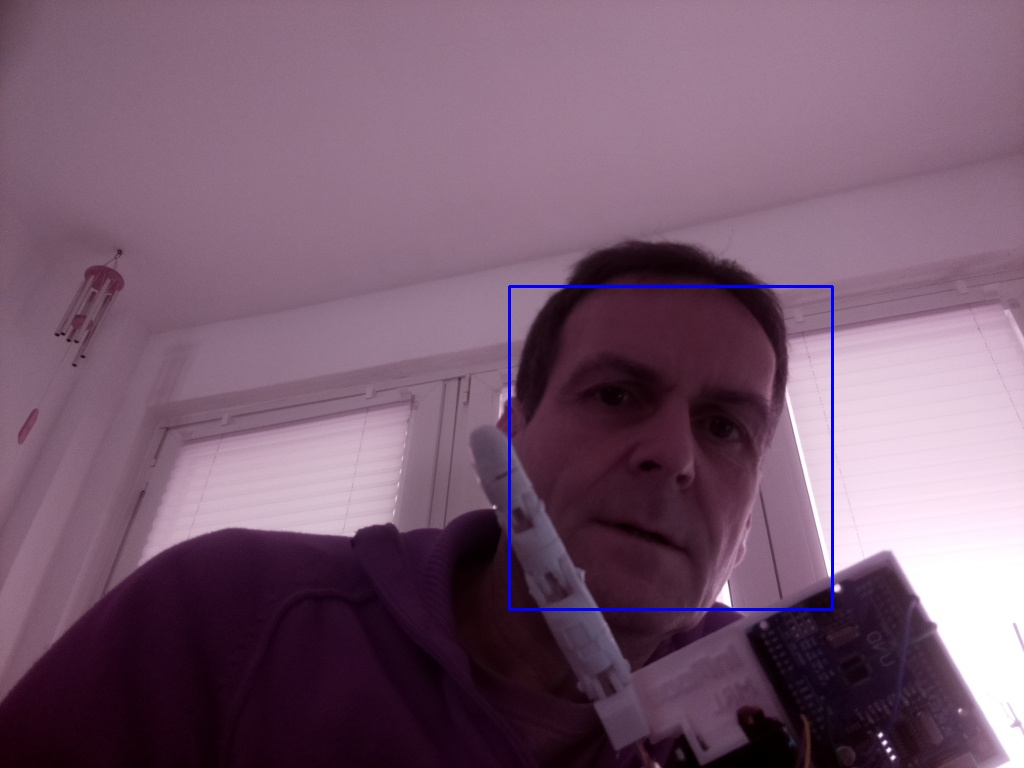
Damit kann die Kamera direkt feststellen, um wie viele Personen es sich handelt, die da vor der Kamera stehen oder sich bewegen.
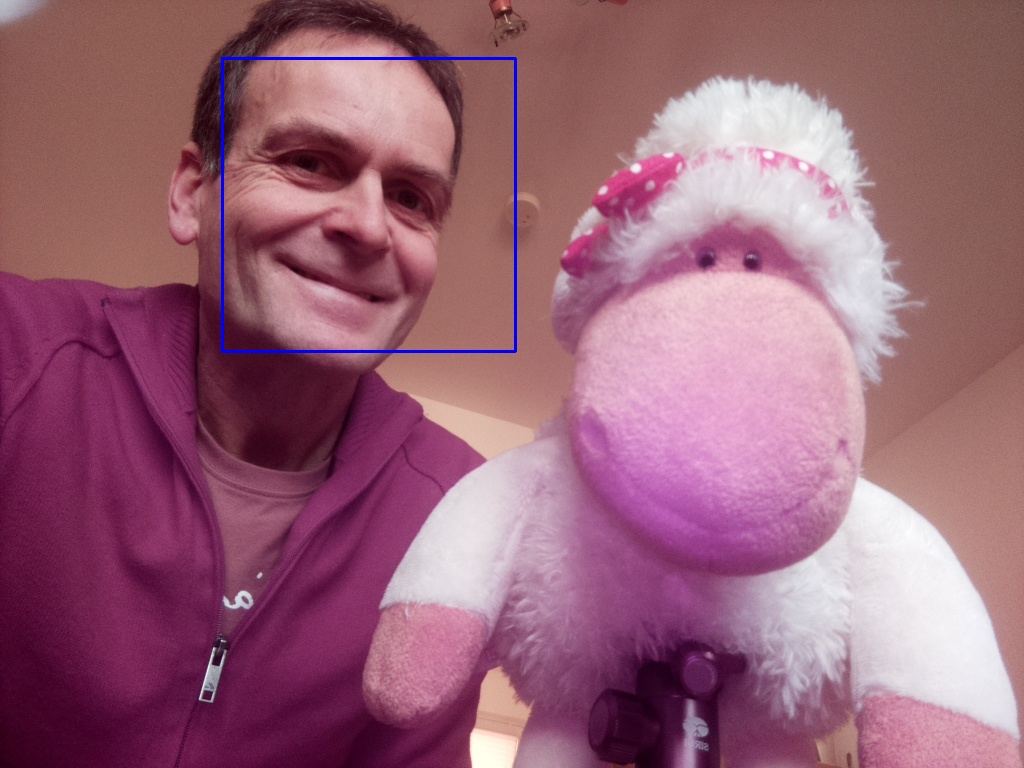


Auch im Großformat unterscheidet OpenCV das Schaf vom Menschen.