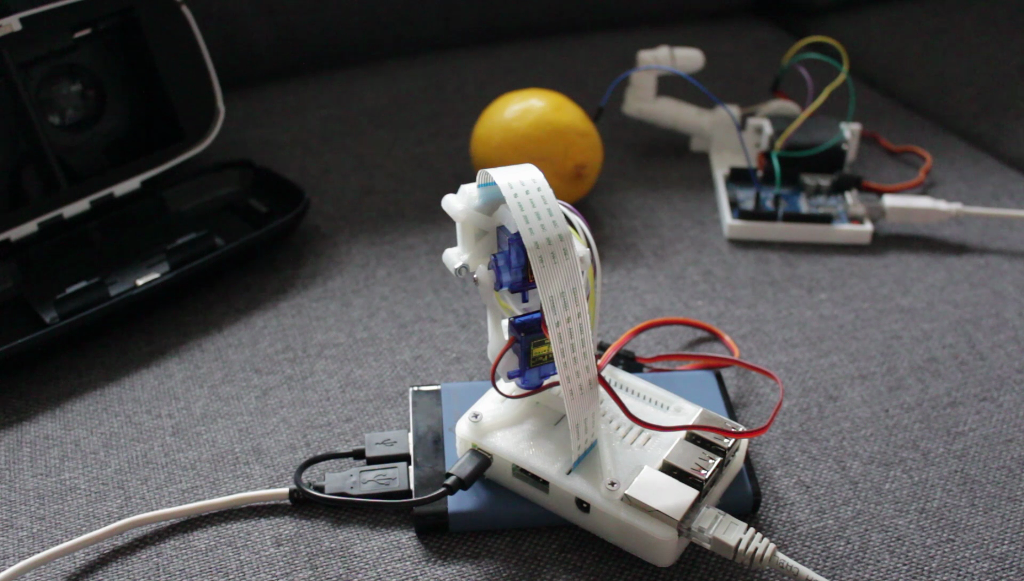
Die Servo Kamera in einem ersten Test. Die Steuerung erfolgt per bash script (Komanndozeile). Im Hintergrund ist bereits das nächste Projekt zu sehen: „InMoov Fingerstarter Kit“ des französischen Designers Gaël Langevin.
Kategorie-Archive: Microcontroller
M(ostly) P(rinted) timelapse dolly – Raspberry Pi Servo
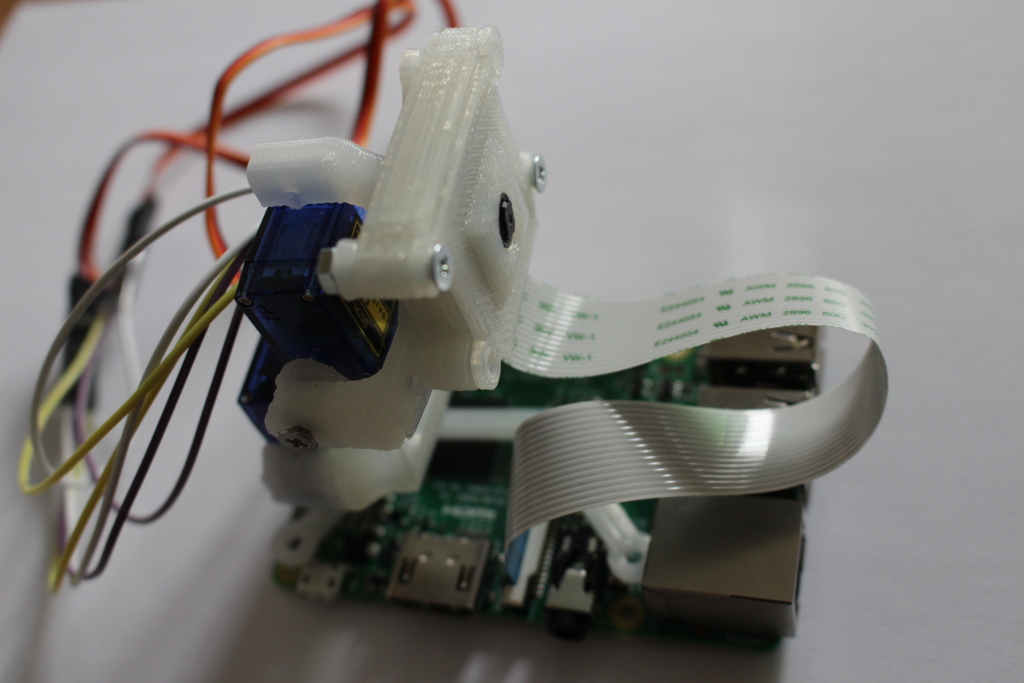
Die Zeitrafferschiene hat zwei weitere Achsen zum Rotieren der Kamera bekommen. Das Smartphone habe ich kurzerhand durch einen Raspberry Pi ausgetauscht. Die Mechanik funktioniert mit 2 Servo Motoren, die direkt an die GPIO’s des RPI angeschlossen sind. Das schicke Teil hat jetzt auch erst einmal eine ganz simple Steuerung per bash script bekommen. Alternativ kann„M(ostly) P(rinted) timelapse dolly – Raspberry Pi Servo“ weiterlesen
M(ostly) P(rinted) timelapse dolly – erster Test

Die Schiene hat von mir eine spezielle Smartphone-Halterung bekommen. Diese Halterung besteht aus einem Kugelgelenk, welches das Smartphone mit einem Akku Ladegerät für Smartphones verbindet. Das Ladegerät versorgt das Smartphone und die Schiene mit ausreichender Energie für unsere Zeitraffer Aufnahmen. Ein erstes Testvideo zeigt: Es funktioniert. Die Wackler im Video kommen nicht von der Schiene, sondern„M(ostly) P(rinted) timelapse dolly – erster Test“ weiterlesen
M(ostly) P(rinted) timelapse dolly
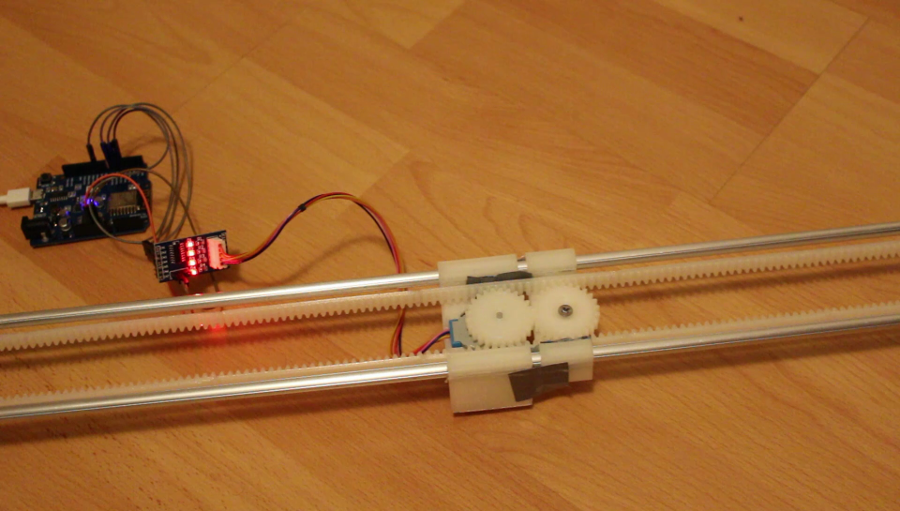
Eine IOT-taugliche, sehr preiswerte, extrem leichte, verblüffend präzise Zeitrafferschiene für Smartphones. BOM: 1 Schrittmotor für ca. 5 Euro 2 Aluminiumstangen aus dem Baumarkt. 1 Schraube samt Mutter (4mm) 1 Kugellager für ein paar Cent 1 ESP8266 (hier: Wemos D1 mini) einige 3D gedruckte Teile für die Mechanik/Konstruktion. Die Gesamtkosten liegen hierbei weit unter 20 Euro.„M(ostly) P(rinted) timelapse dolly“ weiterlesen
M(ostly) P(rinted) Delta – Teil 5

Da bereits ein Steppermotor in die Mechanik verbaut ist, sollte man diesen auch mal (für einen ersten simplen Test) nutzen. Dazu haben wir einen Arduino Mini Pro und einen Pololu A4988 Schrittmotor Treiber auf dem Steckbrett aufgebaut, einen einfachen Sketch auf den Arduino hochgeladen, und siehe da: Et löppt!
M(ostly) P(rinted) Delta – Teil 4
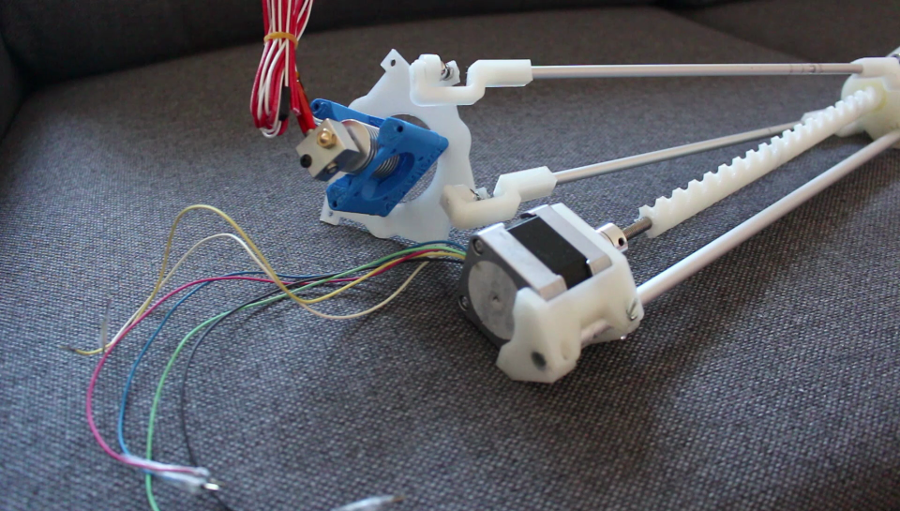
Der neue Effektor ist designed und ausgedruckt. Die Größe der Magnete ist aus Gründen der Gewichtseinsparung sehr klein gewählt: 2 mm Durchmesser, 1 mm Höhe. Damit die Stabilität trotzdem so hoch wie möglich ist, wird die Schwerkraft der Erde genutzt um das Gewicht des Effektors und des Hotends aufzufangen. Dadurch brauchen die Magnete das komplette Drucksystem„M(ostly) P(rinted) Delta – Teil 4“ weiterlesen