
Die Schiene hat von mir eine spezielle Smartphone-Halterung bekommen. Diese Halterung besteht aus einem Kugelgelenk, welches das Smartphone mit einem Akku Ladegerät für Smartphones verbindet. Das Ladegerät versorgt das Smartphone und die Schiene mit ausreichender Energie für unsere Zeitraffer Aufnahmen. Ein erstes Testvideo zeigt: Es funktioniert. Die Wackler im Video kommen nicht von der Schiene, sondern„M(ostly) P(rinted) timelapse dolly – erster Test“ weiterlesen
Kategorie-Archive: Linux
M(ostly) P(rinted) Delta – Teil 5

Da bereits ein Steppermotor in die Mechanik verbaut ist, sollte man diesen auch mal (für einen ersten simplen Test) nutzen. Dazu haben wir einen Arduino Mini Pro und einen Pololu A4988 Schrittmotor Treiber auf dem Steckbrett aufgebaut, einen einfachen Sketch auf den Arduino hochgeladen, und siehe da: Et löppt!
M(ostly) P(rinted) Delta – Teil 4
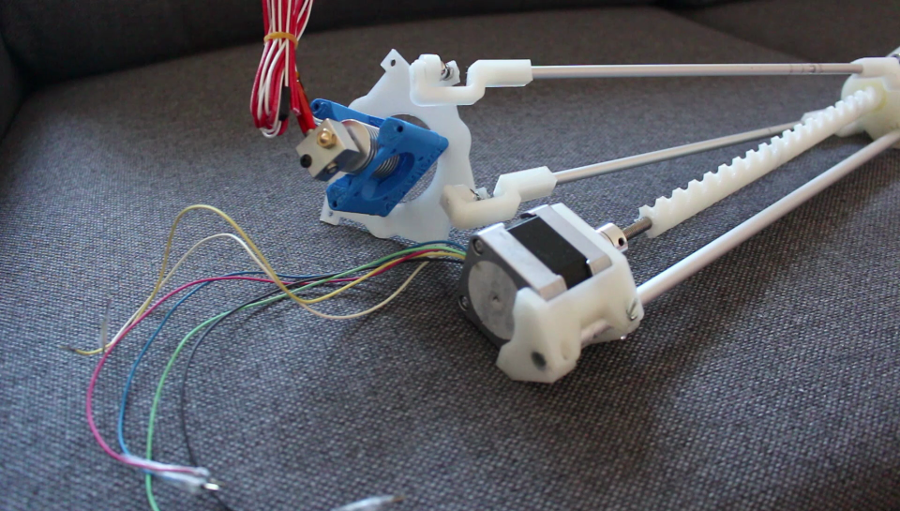
Der neue Effektor ist designed und ausgedruckt. Die Größe der Magnete ist aus Gründen der Gewichtseinsparung sehr klein gewählt: 2 mm Durchmesser, 1 mm Höhe. Damit die Stabilität trotzdem so hoch wie möglich ist, wird die Schwerkraft der Erde genutzt um das Gewicht des Effektors und des Hotends aufzufangen. Dadurch brauchen die Magnete das komplette Drucksystem„M(ostly) P(rinted) Delta – Teil 4“ weiterlesen
M(ostly) P(rinted) Delta – Teil 3

Das Video gibt einen kurzen Überblick über die wichtigsten Bauteile, die für den Drucker erforderlich sind.
M(ostly) P(rinted) Delta – Teil 2
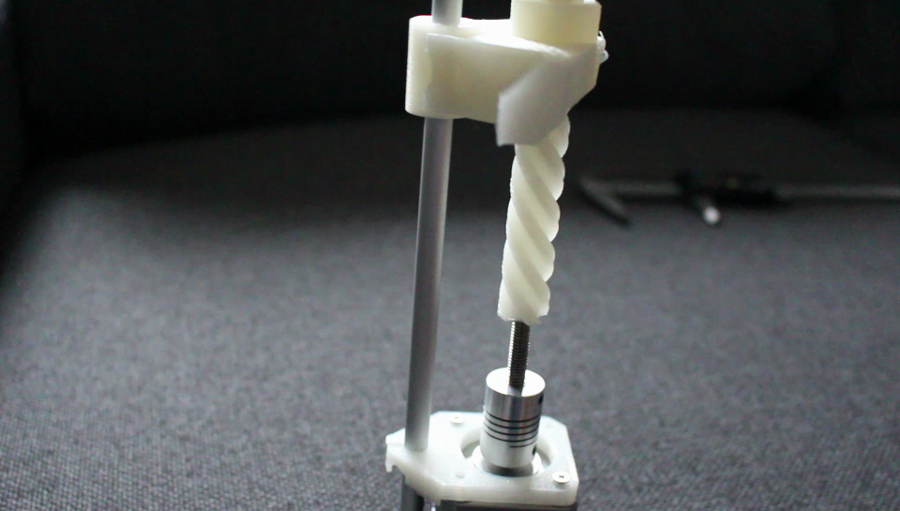
Heute habe ich die Teile fertig stellen können, um erste erfolgreiche Tests mit den ausgedruckten Lineargewinden für den MP-Delta zu machen. Es läuft besser, als erwartet.
M(ostly) P(rinted) Delta

Neues Jahr, neues Glück… im Januar werde ich einige Neuerungen einführen. Der Blog wird in den meisten Teilen auf Deutsch geführt. Das hat nichts mit nationalen Gefühlen zu tun. Der politische Rechtsruck weltweit (USA, Polen, Türkei, Frankreich und auch hier in „bad old Germany“ [um nur einige von vielen zu nennen]) ist ein gutes Motivationsmittel„M(ostly) P(rinted) Delta“ weiterlesen