Nachdem ich vor ziemlich genau einem Jahr begonnen habe, einen Grossformat 3D-Drucker komplett mit Opensource -Mittel zu bauen, gab es einige Ereignisse, die das Projekt in’s Stocken gebracht haben.
Das grundlegende Design basiert zu großen Teilen auf den Prinzipien des Quadrap-3D-Druckers von Shauki B. et al. Diesen Drucker findet man auf
https://github.com/ShaukiBagdadi/quadrap
Der „Dragon Printer“ weicht allerdings in vielen Details vom Original ab.
- Aluminium-Extrusion aus dem heimischen Baumarkt.
- 45° gekippte Aluminiumextrusionen, um unabhängig vom Material zu werden. Quadratische Extrusionen jeglicher Art können so verwendet werden.
- Drachenschnüre statt GT2 Zahnriemen für die Z-Achse.
- Alle Elemente lassen sich sehr schnell und einfach aus-und wieder einbauen (Wartungsfreundlich).
- Die X-Y Achse ist so konstruiert, dass sie sich quasi selbst justiert.
- X/Y-Gantry ist in Hinsicht auf minimales Gewicht bei hoher Stabilität und Geschwindigkeit optimiert
- Alle Bauteile (außer die externen von Thingiverse) wurden in Openscad (Open Soure CAD-Design Tool) entworfen und sind voll parametrisiert.
- Die komplette Konstruktion befindet sich auf 4 x 360° schwenkbaren Laufrollen. Der Drucker lässt sich leicht von einem Raum in einen anderen verschieben.
- Teure Bauteile wurden bewusst vermieden. Es kommt die Mutter aller 3D-Drucker Boards zum Einsatz: Ramps 1.4 mit Marlin 2.0
- 3* TMC2100 Steppermotor-Treiber für nahezu geräuschloses Drucken
- 1* A4988 Treiber für den Extruder
- 3D gedruckter SaintFlint Extruder (vielen Dank an user mmemetea )
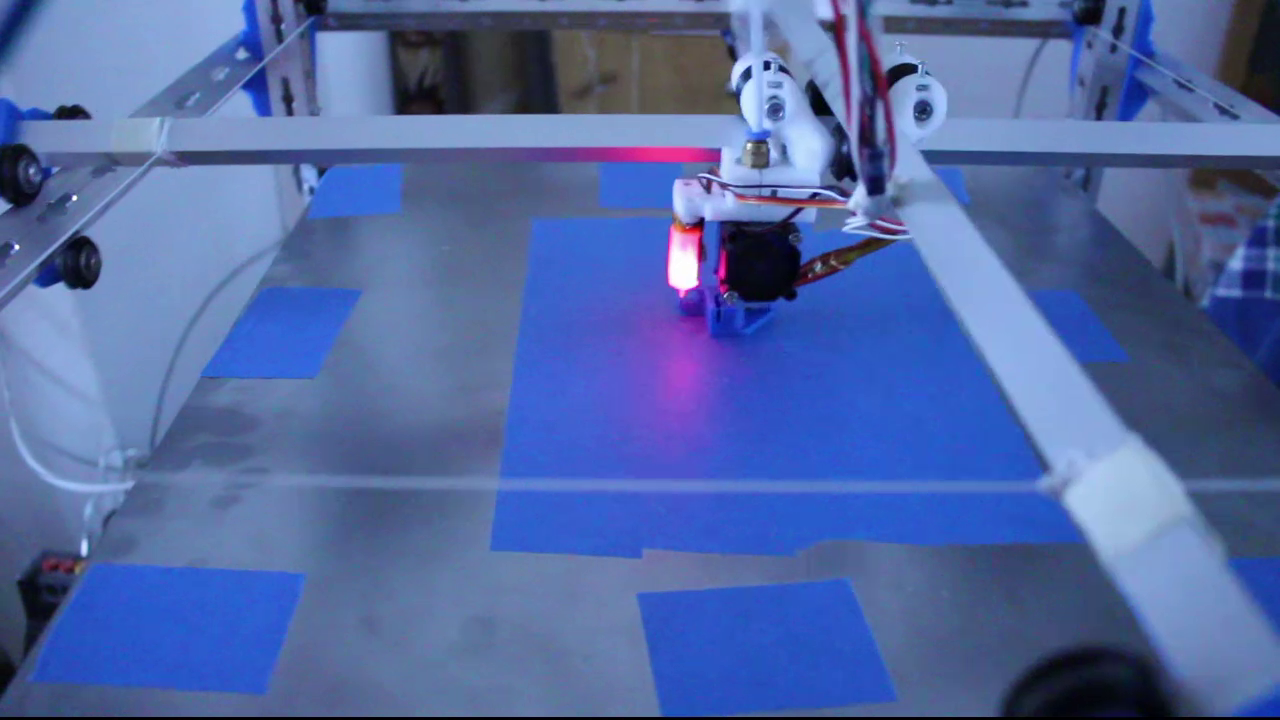
Doch in den letzten Wochen habe ich endlich genug Zeit gefunden, den Drachen mal so richtig an den Start zu schieben.
In diesem Video sieht man den Drucker mit 200 mm/s in Aktion.