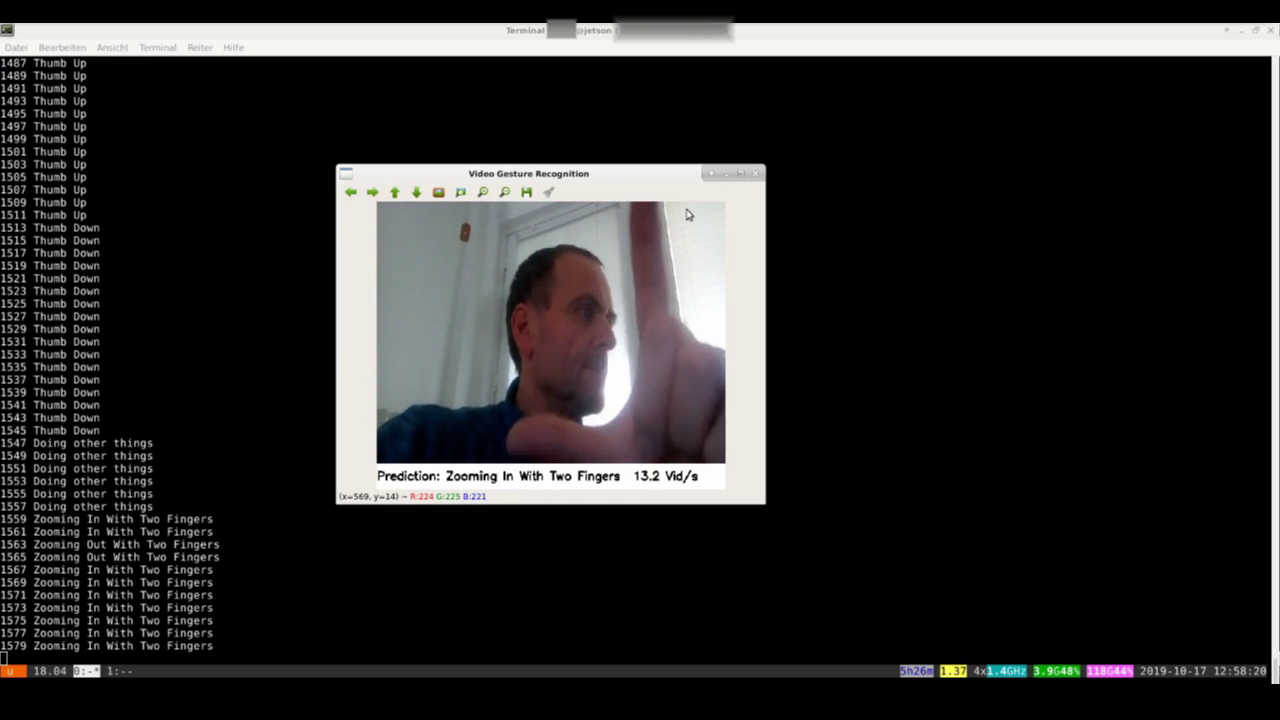
In diesem Video wird ein Teil der Installation der quelloffenen ComputerVision Bibliothek OpenCV in der aktuellen Version 4.1.2 auf dem Nvidia Jetson Nano gezeigt. Die Version ist erst seit kurzem freigegeben und wird noch nicht auf der Hauptseite von opencv.org angezeigt, findet sich aber unter https://github.com/opencv/opencv/tree/4.1.2. Nach erfolgreichem kompilieren wird anhand eines simplen Beispiels gezeigt, wie man mit Hilfe eines neuronalen Netzwerkes und einer Kamera eine einfache, aber funktionierende Gestensteuerung für einen Roboter bauen kann.
Das Projekt kann in der Basisversion von https://github.com/mit-han-lab/temporal-shift-module heruntergeladen werden. Das im Video Beispiel wurde von mir erweitert, um damit einen einfachen Roboter zu steuern.
Eine gute Schritt-für-Schritt Anleitung für das Original-Projekt findet sich auf https://github.com/mit-han-lab/temporal-shift-module/tree/master/online_demo.
Die von mir gemachten Modifikationen zur Robotersteuerung gibt es auf Anfrage.